Quality Assurance
Policy is your friend. Trust the Policy. Love the Policy. Obey the Policy.
General information
About
News
FAQ
Contact us
Documentation
How to file bugs
using
templates
Debian policy
piuparts.d.o configuration:
piuparts.conf
,
distros.conf
,
scripts
and
logs
README
README_server
piuparts manpage
Summaries
Bugs filed
Suites overview
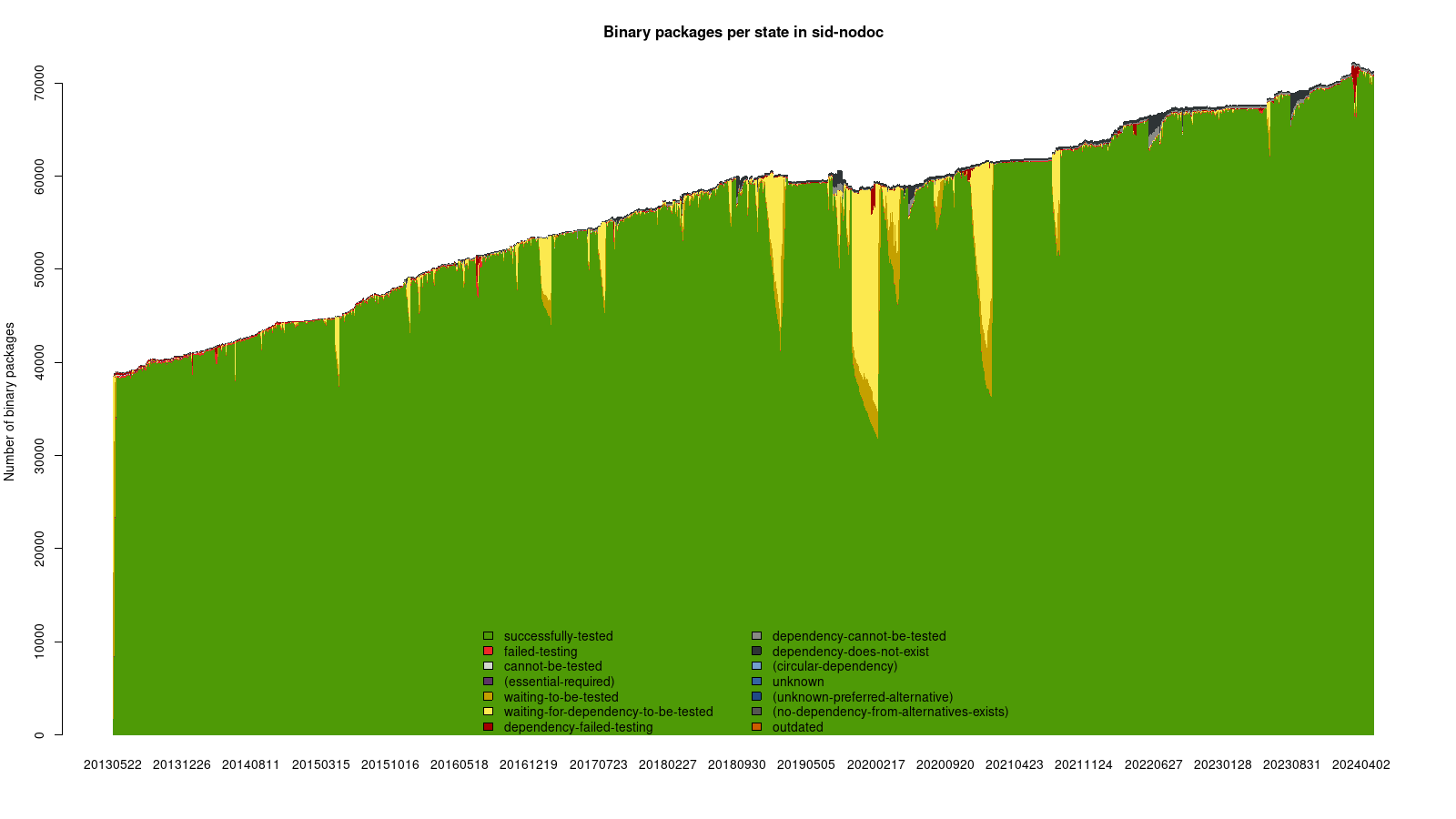
Suite:
sid-nodoc
by maintainer / uploader
by source package
states
graph
all tested suites
experimental
sid2experimental
sid
sid-strict
sid-nodoc
sid-merged-usr
sid-broken-symlinks
testing2sid
forky
forky-rcmd
trixie
trixie-rcmd
trixie-security
trixie-pu
trixie2next
bookworm
bookworm-rcmd
bookworm-security
bookworm-pu
bookworm2next
bullseye
bullseye-rcmd
bullseye-security
bullseye-pu
bullseye2next
stable2sid
stable22sid
oldstable222sid
oldstable22testing
src: piuparts
Source
piuparts.d.o
bugs
piuparts
bugs
/
ToDo
Other Debian QA efforts
Debian QA Group
Dose tools (former: EDOS)
Lintian
Debian Package Tracker
Ultimate Debian Database
jenkins.debian.net
ci.debian.net
Last update
2026-07-27 03:01 UTC
ros-ros-comm-msgs in sid-nodoc
Source:
ros-ros-comm-msgs
piuparts summary:
Version:
1.11.4-1
Maintainer:
Debian Science Maintainers <debian-science-maintainers@lists.alioth.debian.org>
Uploaders:
Jochen Sprickerhof <jspricke@debian.org>
,
Leopold Palomo-Avellaneda <leo@alaxarxa.net>
,
Timo Röhling <roehling@debian.org>
,
Binary:
cl-rosgraph-msgs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1
Binary:
cl-std-srvs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1
Binary:
libros-rosgraph-msgs-dev
piuparts-result:
successfully-tested
1.11.4-1+b1
Version:
1.11.4-1+b1
Binary:
libstd-srvs-dev
piuparts-result:
successfully-tested
1.11.4-1+b1
Version:
1.11.4-1+b1
Binary:
python3-rosgraph-msgs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1
Binary:
python3-std-srvs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1
Binary:
ros-rosgraph-msgs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1
Binary:
ros-std-srvs:all
piuparts-result:
successfully-tested
1.11.4-1
Version:
1.11.4-1

 Quality Assurance
Quality Assurance
Quality Assurance
Quality Assurance

{kind=link}